October 2025
Modular drone payload releasing mechhanism
Technologies
Description
The Modular Drone Payload Releasing Mechanism is a lightweight payload delivery system designed to be mounted on many different drones, including sub-250 g drones such as the DJI Mini series.
The device was created as a general-purpose payload release system that can carry and deploy different types of payloads. During the CanSat project, it was used extensively for drop tests with both dummy and fully functional satellite prototypes. This allowed our team to test flight stability, parachute deployment, and overall system performance before the official rocket launch.
The system was successfully used during many real-world flight tests and reliably deployed payloads weighing up to 500 g. Throughout testing, the release mechanism worked consistently and became the main platform we used for validating CanSat flight and recovery systems before competition flights.
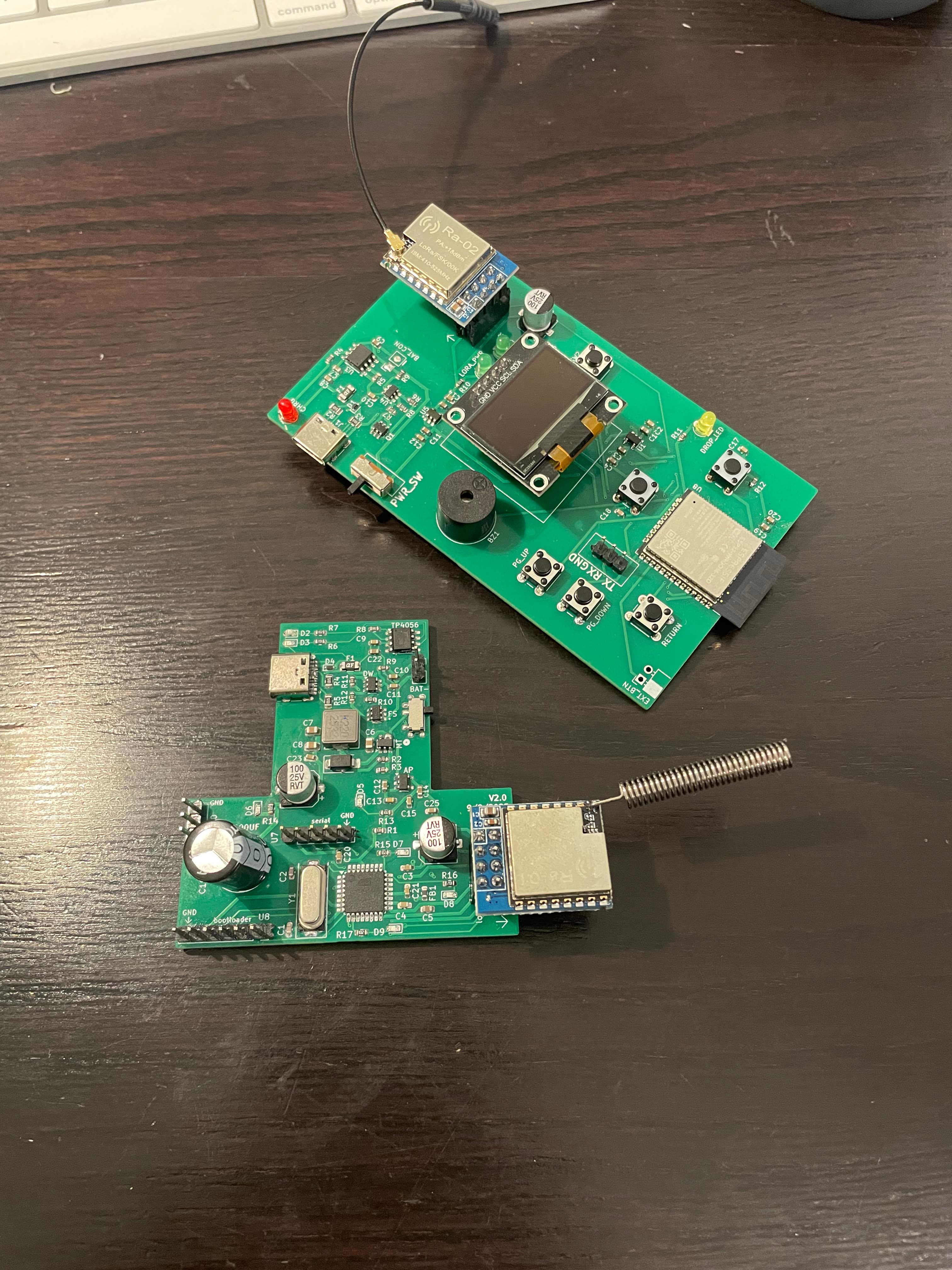
The system consists of two custom electronic modules: an onboard release unit mounted to the drone and a handheld remote controller. The release unit uses a servo-actuated locking mechanism that safely holds the payload during flight and releases it on command. Communication between the drone module and the remote controller allows remote payload deployment and real-time telemetry transmission.
The project includes custom-designed PCBs, embedded software written in C++, and fully custom mechanical structures developed specifically for lightweight aerial use.
My Role
This was mainly a self-led project, and I was responsible for almost every part of its design, development, and testing.
I designed the complete electrical architecture of the system and created custom two-layer SMD PCBs in KiCad for both the drone-mounted release module and the handheld remote controller. I assembled and tested the hardware myself and developed the embedded C++ software running on both systems. The onboard release module was built around an ATmega328P microcontroller, while the remote controller used an ESP32-WROOM module for control and telemetry display functionality.
For the mechanical design, I created the full payload release mechanism and protective enclosures in Onshape. This included designing a servo-driven locking system that could securely hold payloads during flight while still being light enough for use on smaller drones. I also designed a protective enclosure for the remote controller to improve durability and make it easier to use outdoors.
To improve the design, I went through extensive prototyping, weight estimation, and multiple design iterations to keep the system lightweight while still maintaining enough structural strength. I paid particular attention to removing unnecessary material while reinforcing the areas that carried the highest loads.
During the CanSat project, I also created detailed user documentation and setup instructions, allowing other team members to install, configure, and operate the system independently. This made flight testing much smoother and reduced setup time during field testing.
Learnings and Challenges
The project involved several major engineering challenges across electronics, mechanical design, and weight optimization.
One of the biggest obstacles was PCB development, since this was the first custom PCB I had ever designed. The first revision failed because some traces were too narrow to reliably handle the current needed by the servo system. After analyzing the problem and redesigning the board, I made a second revision that worked reliably and met the project requirements.
Another major challenge was designing a release mechanism that could work with only one servo while still being reliable, lightweight, and strong enough to support relatively heavy payloads. After testing multiple concepts, I developed a pin-based locking mechanism where the servo pushes a retaining pin horizontally out of a locking shell, allowing the payload to separate cleanly and consistently. This design proved capable of reliably carrying and releasing payloads weighing up to 500 g.
Weight was also a critical design constraint. To make the system compatible with small drones, I carefully optimized the structure through CAD analysis, simulations, and repeated prototyping. I removed material wherever possible without weakening the structure, resulting in a lightweight but durable design made from PLA and PETG.
The system’s robustness was demonstrated during testing when a drone crashed for reasons unrelated to the release mechanism. Although the external enclosure was badly damaged, the internal electronics stayed protected and fully functional. I was able to print and install a replacement enclosure in less than three hours, which showed that the design was both durable and easy to maintain.